Politica de seguridad

Política de entrega
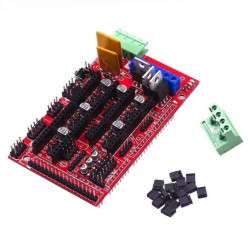
sta placa de expansión como placa de expansión del controlador, se puede utilizar para máquinas de grabado, impresoras 3D.
Es un total de cuatro ranuras, puede conducir cuatro motores paso a paso A4988. Cada motor paso a paso de carretera solo necesita dos puertos IO. En otras palabras, seis puertos IO se pueden administrar bien con tres motores paso a paso. Muy conveniente de usar.
UNO for Arduino module IO port correspondence introduction:
UNO for Arduino-------- expansion board
8 -------- EN ( stepper motor driver enable , active low )
7 -------- Z.DIR (Z -axis direction control )
6 -------- Y.DIR (Y -axis direction control )
5 -------- X.DIR (X -axis direction control )
4 -------- Z.STEP (Z -axis stepper control )
3 -------- Y.STEP (Y -axis stepper control )
2 -------- X.STEP (X -axis stepper control )
/ / The following is a simple stepper motor control procedures,
# define EN 8 / / stepper motor enable , active low
# define X_DIR 5 / / X -axis stepper motor direction control
# define Y_DIR 6 / / y -axis stepper motor direction control
# define Z_DIR 7 / / z axis stepper motor direction control
# define X_STP 2 / / x -axis stepper control
# define Y_STP 3 / / y -axis stepper control
# define Z_STP 4 / / z -axis stepper control
/ *
/ / Function : step . function: to control the direction of the stepper motor , the number of steps .
/ / Parameters : dir direction control , dirPin corresponding stepper motor DIR pin , stepperPin corresponding stepper motor ” step ” pin , Step number of step of no return value.
* /
void step (boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite (dirPin, dir);
delay (50);
for (int i = 0; i
digitalWrite (stepperPin, HIGH);
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {/ / The stepper motor used in the IO pin is set to output
pinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
pinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, LOW);
}
void loop () {
step (false, X_DIR, X_STP, 200); / / X axis motor reverse 1 ring, the 200 step is a circle.
step (false, Y_DIR, Y_STP, 200); / / y axis motor reverse 1 ring, the 200 step is a circle.
step (false, Z_DIR, Z_STP, 200); / / z axis motor reverse 1 ring, the 200 step is a circle.
delay (1000);
step (true, X_DIR, X_STP, 200); / / X axis motor forward 1 laps, the 200 step is a circle.
step (true, Y_DIR, Y_STP, 200); / / y axis motor forward 1 laps, the 200 step is a circle.
step (true, Z_DIR, Z_STP, 200); / / z axis motor forward 1 laps, the 200 step is a circle.
delay (1000);
}
Nota: Al insertar el módulo A4988, debe tener cuidado de no insertar lo opuesto. Cableado del motor paso a paso de la siguiente manera:
2A, 2B es un grupo (rojo, verde), 1A, 1B es un grupo (azul, amarillo), si desea cambiar de dirección, puede cambiar la posición de un grupo, por ejemplo 2A, 2B intercambiados mutuamente.